

서 언
재료 및 방법
1. 3차원 영상 획득 및 체중 측정
2. 영상 처리 및 분석
3. 체중 추정 모델
결과 및 고찰
1. 한우의 월령 및 체중 분포
2. 선형회귀 모형을 이용한 체중 추정
3. 중회귀 모형을 이용한 체중 추정
서 언
한우의 체중은 사료 요구량, 영양 상태 및 생산성 등을 평가하는 데 있어서 중요한 지표에 해당한다(Gionbelli 등, 2015; Kawasue 등, 2013). 그런데 한우의 체중 측정에 많은 노동력이 소요되거나, 작업자의 부상 위험이 존재한다. 더구나 체중 측정 단계에서 가축이 적지 않은 스트레스를 받기도 한다. 그러므로 기존 방법에 비해서 작업자의 안전성 확보는 물론 노동력이 적게 들며, 가축이 스트레스를 받지 않는 체중 측정 방법의 개발이 요구되고 있다.
공학 분야에 널리 사용되고 있는 컴퓨터 시각 기술이 농업 분야에도 적용되고 있다(Kashiha 등, 2014; Ozkaya와 Bozkurt, 2008; Seo 등, 2011). 컴퓨터 시각 기술은 비접촉 또는 비파괴적인 측정이 가능한 장점을 지니고 있다. 최근 들어 3차원(three-dimensional, 3-D) 컴퓨터 시각을 농업 분야에 이용한 사례가 빠르게 늘어나고 있다(Garrido 등, 2015; Jang 등, 2019; Wu 등, 2004). 3-D 영상은 대상 물체의 위치에 따라 관측 지점으로부터 떨어진 거리, 즉 깊이 정보의 집합으로 구성된다. 때문에 방대한 정보를 지니고 있는 3-D 영상으로부터 깊이 정보를 추출하는 작업은 3-D 영상 처리의 핵심 기술에 해당한다(Vázquez- Arellano 등, 2016). 3-D 영상에서 깊이 정보를 결정할 때 삼각측량, 비행시간 및 간섭 등의 원리가 적용되고 있다(Song 등, 2018; Viazzi 등, 2014).
최근 들어 젖소의 신체충실지수(body conditioning score)를 결정하는 데 3-D 영상이 사용되고 있다(Hansen 등, 2018; Pezzuolo 등, 2018; Spoliansky 등, 2016). 3-D 영상 처리 기술이 가축의 체형 정보 결정 또는 체중 추정의 유용한 수단으로 기대를 모으고 있으나 한우를 대상으로 한 연구는 최근에 시도되고 있다. 이 가운데 획득된 한우의 3-D 영상으로부터 체장, 체고, 흉폭 등의 체형 정보 결정 및 이를 이용한 체중 추정의 가능성이 제시된 바 있다(Jang 등, 2020). 그런데, 3-D 영상으로부터 체장이나 흉폭을 결정할 때 측정 기준의 설정이 애매하여 체형 정보가 일정한 값을 유지하기가 쉽지 않을 뿐만 아니라 체형 정보의 결정에 많은 노력이 포함된다. 만일 한우의 체형 정보를 개별적으로 결정하는 대신에 체적을 이용하여 체중을 쉽게 추정할 수 있다면 체형 정보의 결정에 소요되는 노력이 크게 줄어들 것이다. 한편, 한우의 월령이 늘어날수록 체중과 월령 사이에 높은 상관관계가 존재한다(Lee와 Ohh, 1985). 그러므로 한우의 체중 추정을 위한 설명변수로서 몸통 체적에 월령을 추가할 경우 추정오차가 줄어들 것이다.
본 연구는 한우의 3-D 영상으로부터 몸통을 분리한 후 몸통 체적을 결정하고, 결정된 몸통 체적과 월령 변수를 이용하여 한우의 체중을 추정하고자 수행되었다.
재료 및 방법
1. 3차원 영상 획득 및 체중 측정
본 연구에서 사용된 3-D 영상획득 장치는 3-D 카메라, 카메라 지지용 암(arm), 균형추, 삼각대 등으로 구성된다(Fig. 1). 3-D 영상획득용 카메라로서 time of flight(TOF) 방식의 카메라(StarForm Swift, Odos Imaging, Edinburgh, United Kingdom)가 사용되었다. 640×480 픽셀의 해상도, 44 fps의 프레임속도 및 47°(H)×37°(V)의 화각을 갖는 TOF 카메라는 TOF 센서에서 발광된 적외선이 대상 물체의 임의의 위치로부터 반사된 후 TOF 센서에 수신되기까지 소요된 비행시간을 이용하여 카메라와 물체 사이의 거리, 즉 깊이정보를 측정한다. 카메라 지지용 암 끝 부분에 설치된 3-D 카메라는 샘플의 위에서 본 평면도(top-view) 영상을 획득한다. 카메라의 최대 설치 높이는 4.0m이며, 실제 높이는 레이저거리계(DISTOX4, Leica, Wetzlar, Germany)를 사용하여 측정하였다.
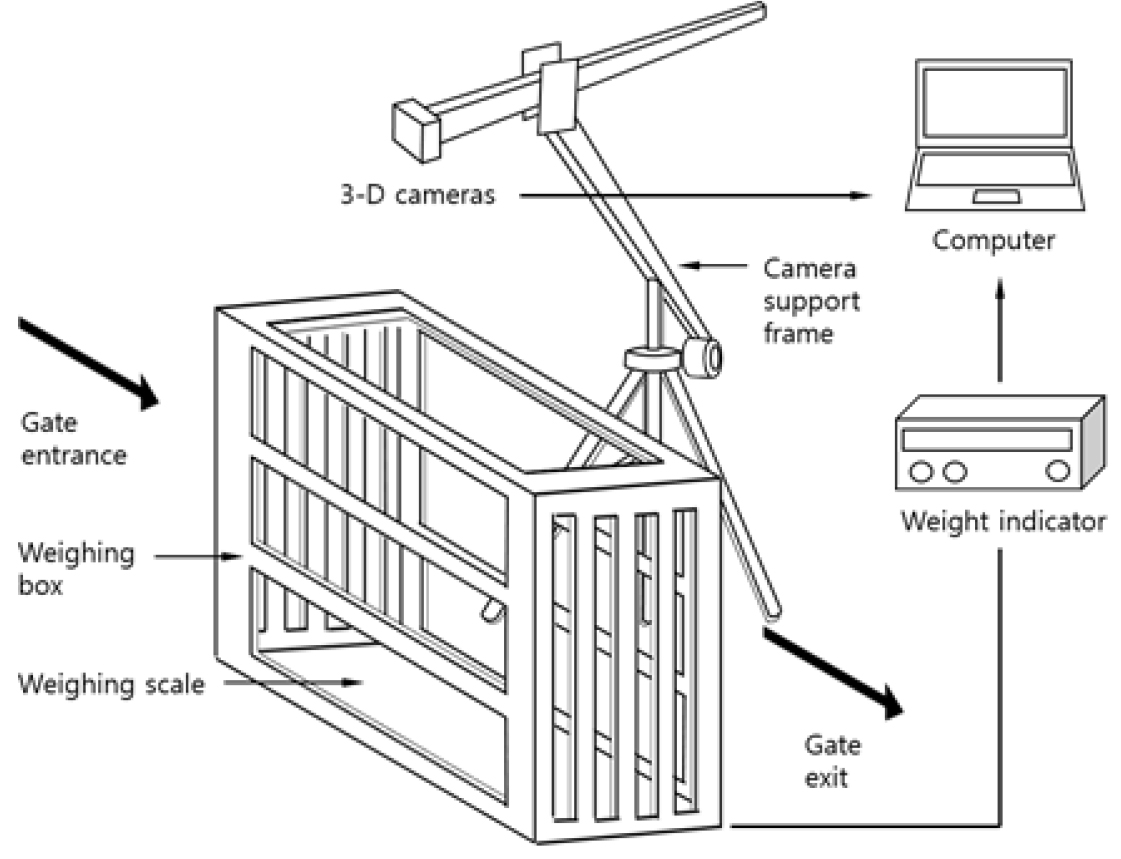
본 연구에서 한우의 3-D 영상은 전북 정읍시에 소재한 개인농장에서 사육되고 있는 한우 256두를 대상으로 측정되었다. 즉, 한우의 이동 통로에 설치된 체중계 내로 유도된 한우가 정지 상태를 유지할 때 3-D 영상을 획득하였다. 체중계는 로드셀을 포함한 전자저울(HFS, CAS Scale, Seoul, Korea)과 한우의 이동을 제한하는 철제 프레임으로 이루어진다.
2. 영상 처리 및 분석
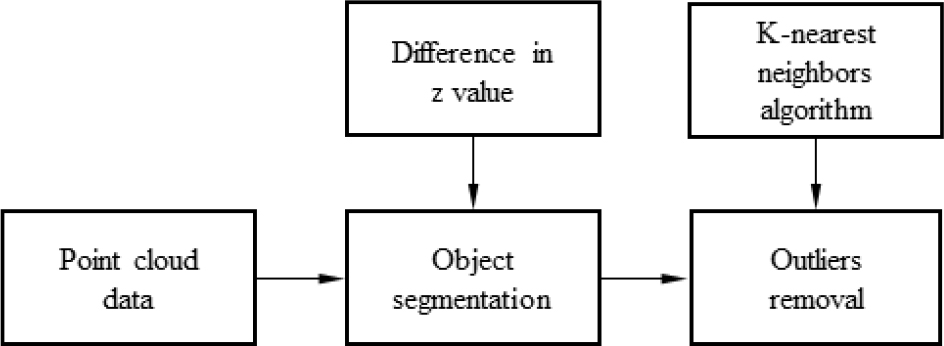
획득된 3-D 영상은 점구름 데이터(point cloud data, PCD) 파일 형태로 저장된다. PCD 는 대상 물체의 3차원 좌표, 에 해당하는 점들의 집합을 의미한다. 여기에서 값은 임의의 화소 에서의 깊이 정보를 나타낸다. 본 연구의 영상 처리 및 분석에 MATLAB(2019a, MathWorks, Natick, USA)의 Computer Vision System and Image Processing toolbox를 사용하였다.
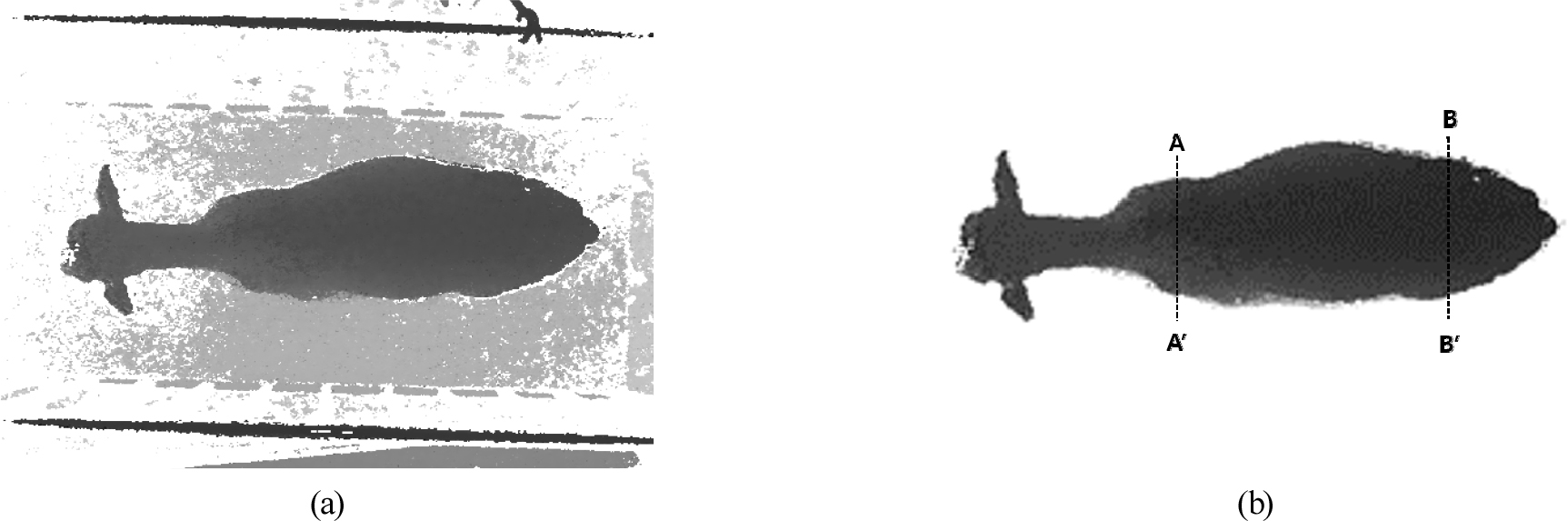
획득된 3-D 영상에 한우의 top-view 모습뿐만 아니라 주위 물체, 바닥 또는 이상치 등이 포함될 수 있다. 또한 한우의 위치 및 움직임에 따라 오차가 발생할 수 있다. 그러므로 본 연구에서의 영상 처리는 본래 영상으로부터 배경을 분리한 후 이상치를 제거하였다. 먼저 3-D 영상에서 한우를 포함한 관심영역을 설정한 후 배경과 한우 몸통을 분리하였다. 배경 분리를 위한 문턱값으로서 깊이 정보를 사용하였다. 즉, 배경 분리에 한우가 포함된 3-D 영상과 포함되지 않은 3-D 영상에서 화소단위의 값 차이를 이용하였다(Fig. 2). 다음으로 PCD에 카메라 렌즈의 왜곡, 난반사 등으로 인해서 이상치가 포함될 수 있다(Kramer, 2013). 이러한 이상치는 대상 물체의 형상 인식 또는 깊이 정보의 추출 과정에서 오차를 만들 수 있다. 본 연구에서는 인접한 점들의 거리에 대한 평균과 표준편차를 계산하여 이상치를 제거하는 k 최근접 이웃 알고리즘(Rusu 등, 2008)을 적용하였으며, 이전 연구에서 원예산물의 경계를 인식할 때 사용한 바 있었다(Jang 등, 2019).
한우의 몸통 체적을 계산할 때 머리 또는 꼬리의 움직임으로 인해서 체형이 그릇되게 측정될 수 있다. 이러한 문제를 극복하고자 3-D 영상에서 기준 설정이 상대적으로 용이한 한우의 앞다리(A-A’)와 뒷다리(B-B’) 부근의 폭이 각각 최대인 지점을 몸통의 좌우 경계로 정의하였다(Fig. 3). A-A’ 라인은 한우의 체고를 결정하는 데 필요한 어깨 부위의 최고점을 포함하며, B-B’ 라인은 십자부고를 측정하는 부위를 포함한다.
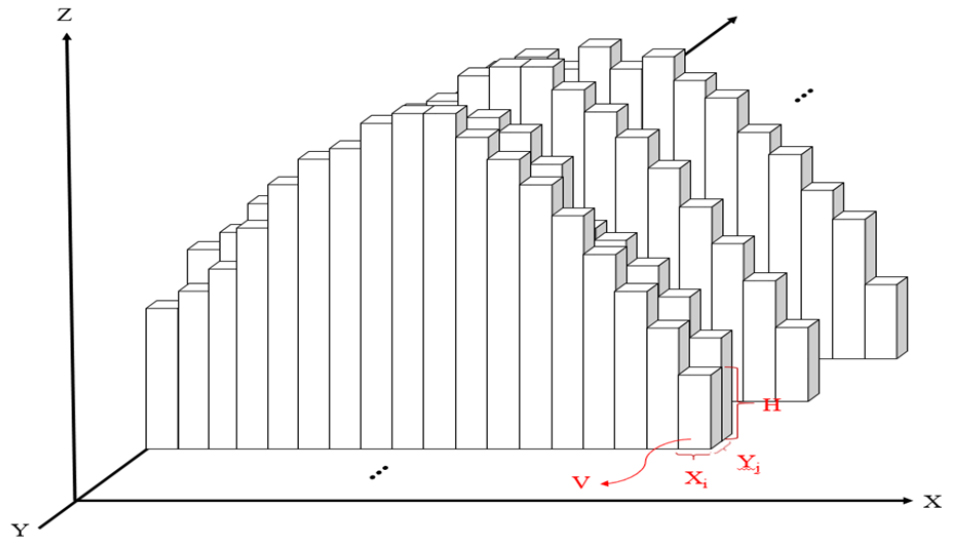
한우의 3-D 영상을 이용하여 몸통 체적을 계산하려면 점의 집합 형태로 존재하는 데이터를 체적 계산이 가능한 형태로 변환해야 한다. 이를 위해서 본래의 PCD 영상에 보간법을 적용하여 격자별로 깊이 정보를 지니고 있는 격자 영상으로 변환하였다(Fig. 4).
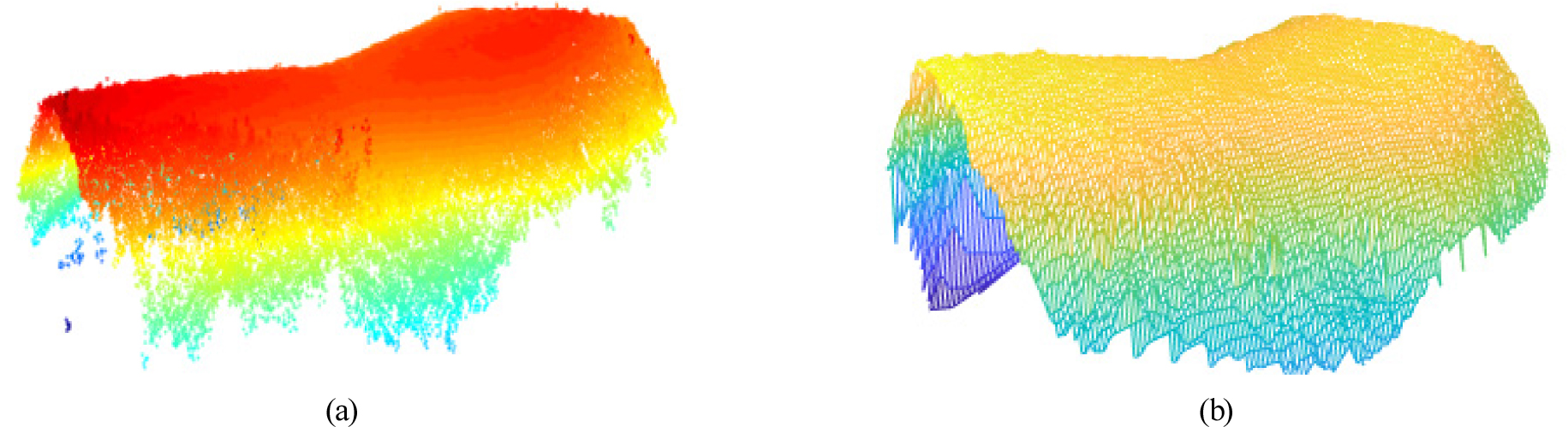
개별 격자가 지니고 있는 깊이 정보는 카메라로부터 떨어진 한우 몸통 표면까지의 거리에 해당한다. 격자 영상에 해당하는 몸통 체적은 개별 격자의 수치적분으로 결정된다(Fig. 5).
여기서, : 격자 영상 체적, : 방향의 격자 간격, : 방향의 격자 간격, : 개별 격자의 높이이다. 본 연구에서 로 설정하였다. 한편 과 은 각각 방향과 방향의 격자 수에 해당한다.
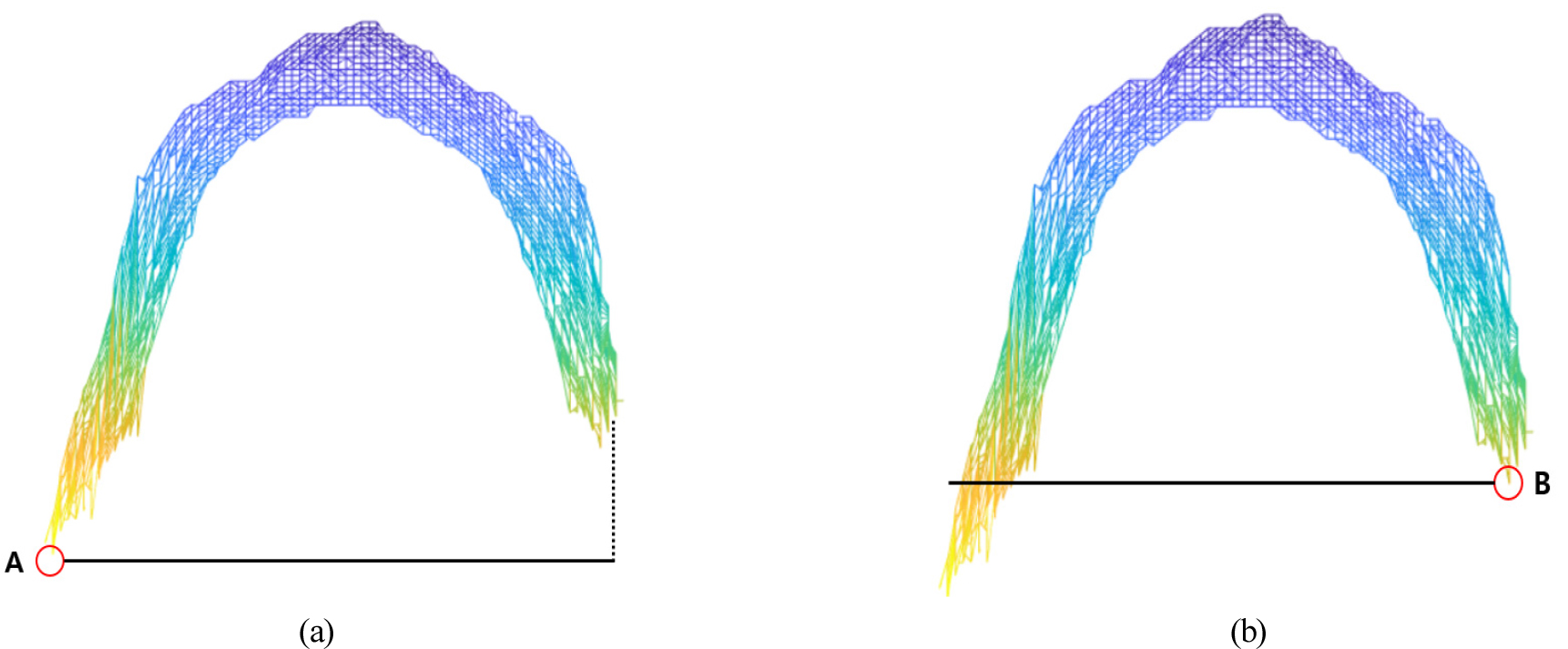
격자 형태로 변환된 PCD를 한우의 몸통 단면을 기준으로 살펴보면 좌우 경계에서의 높이가 다를 수 있다. 경계에 해당하는 점 A, B에서의 높이가 다르기 때문에 각각의 높이를 기준으로 계산되는 격자 영상의 체적은 다르게 된다. 따라서 본 연구에서는 점 A를 기준으로 이루어진 격자 영상의 체적을 , 점 B를 기준으로 한 체적을 로 정의하였다(Fig. 6).
3. 체중 추정 모델
한우의 ToF 영상에서 결정된 몸통 체적을 이용하여 체중을 추정하고자 선형회귀(Simple linear regression, SLR) 모형을 적용하였다. 또한, 한우의 몸통 체적과 월령을 설명변수로 설정한 중회귀(multiple linear regression, MLR) 분석을 수행하였다.
3-D 영상이 획득된 한우 256두 중에서 움직임으로 인하여 머리 또는 엉덩이와 같은 몸의 일부가 휘거나, 몸통이 체중계의 프레임에 닿아 배경과 몸통을 정확하게 분리하기 어려운 영상을 제외한 155두의 영상을 calibration dataset과 validation dataset으로 각각 70%, 30%로 구분한 후 회귀 분석을 실시하였다. 분석에 SAS(V9.4, SAS Institute Inc., USA)를 사용하였으며, 회귀 분석에 따른 성능 확인 기준으로서 Mean absolute percentage error(MAPE)와 Root mean square error(RMSE)를 이용하였다.
여기서, : 데이터의 수, : 실측값, : 예측값과 실측값의 차이다.
결과 및 고찰
1. 한우의 월령 및 체중 분포
본 연구의 3-D 영상 분석에 사용된 한우는 모두 24개월령 미만으로서 월령에 따른 체중 특성은 Table 1과 같다. 표본 중에서 6-12개월령의 한우가 차지하는 비중은 38.7%로서 가장 높게 나타났고, 이들의 평균 체중은 230.0kg이었다. 다음으로 27.7%를 차지한 6개월령 미만의 한우의 평균 체중은 125.1kg으로 나타났다. 이밖에 12-18개월령과 18-24개 월령에 해당하는 한우의 평균체중은 각각 329.5kg, 364.6kg이었다.
Table 1.
Age and body weight of Hanwoo sampled in this study.
| Age (year) | Number of samples | Ratio (%) | Body weight (kg) |
|
0-0.5 0.5-1.0 1.0-1.5 1.5-2.0 |
43 60 31 21 |
27.7 38.7 20.0 13.6 |
125.1 ± 40.4 230.0 ± 49.0 329.5 ± 37.7 364.6 ± 23.5 |
| Sum | 155 | 100.0 |
2. 선형회귀 모형을 이용한 체중 추정
Calibration dataset의 격자 영상에서 결정된 한우의 몸통 체적과 체중 사이의 SLR 분석 결과는 다음과 같다.
여기서, : 한우 체중(kg), : 경계점 A를 기준으로 결정된 몸통 체적(m3), : 경계점 B를 기준으로 결정된 몸통 체적(m3)이다. 기준 경계점의 위치에 따른 격자 영상의 체적 또는 를 이용한 체중 추정의 결정계수는 각각 0.8725, 0.7218로 나타났다. 를 이용하였을 때 결정계수가 작게 나타난 이유로서 기준점 B의 아래에 위치한 데이터의 손실을 들 수 있다. Validation dataset에 대해서 격자 영상의 체적 를 적용하였을 때에 체중 추정의 MAPE와 RMSE는 각각 8.6%, 24.9kg으로 나타났다. 한편, 체적 를 적용한 경우의 MAPE와 RMSE는 각각 17.3%, 50.8kg으로 나타났다. 에 기초하여 체중을 추정한 경우의 MAPE와 RMSE가 를 적용한 경우에 비해서 크게 나타난 것은 결정계수의 차이에서와 마찬가지로 기준점 B를 기준으로 아래에 위치한 몸통 데이터의 소실에 따른 결과로 판단된다. 본 연구에서는 획득된 3-D 영상에서 한우와 배경을 분리하고자 깊이 정보를 사용하였다. 또한 3-D 영상의 이상치를 제거하고자 k 최근접 이웃 알고리즘을 적용하였다. 일반적으로 이러한 단계를 거치면서 실제의 한우 체형에 상당한 3-D 영상을 얻을 수 있다. 그럼에도 불구하고 체적 계산을 위한 기준점의 경계 위치에 따라 결정계수, MAPE 및 RMSE가 다르게 나타난 바, 배경 분리 또는 이상치 제거를 포함한 3-D 영상의 전처리 작업이 보다 정확하게 이루어져야 할 것이다.
3. 중회귀 모형을 이용한 체중 추정
한우의 체중을 추정하는데 있어서 체장, 체고, 흉폭 등의 체형정보뿐만 아니라 월령이 중요한 지표에 해당한다. 실제로, 한우의 체중과 월령 사이의 상관계수가 0.9190으로 높게 나타났다(Jang et al., 2020). 이에 본 연구에서는 몸통 체적과 월령을 설명변수로 설정한 MLR을 분석하였으며, calibration dataset에 대한 결과는 다음과 같다.
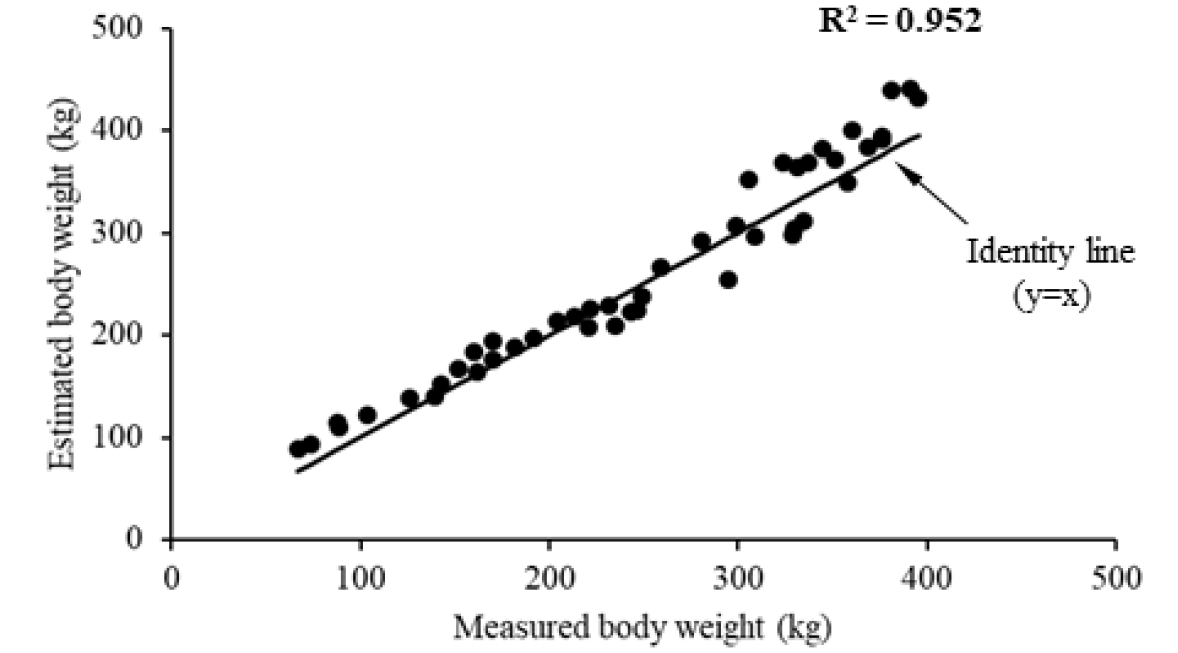
여기서, : 한우 월령(year)이다. 선형회귀 모형에 설명변수로서 월령을 추가하였을 때 격자 영상의 체적 와 에 대한 체중 추정의 결정계수는 각각 0.9083, 0.8801로 나타났다. 결국 월령 변수를 추가하였을 때 결정계수가 늘어났고, 이러한 결과는 를 적용한 경우에 분명하게 나타났다. Validation dataset에 대해서 체중 추정의 MAPE와 RMSE는 를 적용하였을 때 각각 8.2%, 24.5kg으로서 월령 변수를 추가하지 않은 경우에 비해서 MAPE와 RMSE가 약간 줄어들었다. 월령 변수의 추가로 인해서 한우의 체중 추정을 위한 회귀 모형의 성능이 개선된 결과는 이전 연구(Jang et al., 2020)에서 보고된 바 있다. 즉 한우의 체장, 체고, 흉폭 등의 체형정보를 이용한 체중 추정에서 설명변수에 월령이 포함된 경우 MAPE와 RMSE는 각각 17.1%, 51.4kg으로 나타났다(Jang et al., 2020). 그러므로 한우의 체형정보를 이용하여 체중을 추정한 경우에 비해서 몸통 체적을 이용하여 체중을 추정할 때 추정 오차가 크게 줄어들었다. 더구나 한우의 3-D 영상으로부터 체장, 체고, 흉폭 등의 체형정보를 결정할 때 많은 노력이 소요됨을 고려한다면 체형정보 대신에 체중 추정에 적합한 새로운 지표가 요구된다. 한편 한우의 3-D 격자 영상으로부터 몸통 체적을 결정하는 것은 수치적분에 의해서 간단하게 이루어졌다. 결과적으로 몸통 체적을 이용한 한우의 체중 추정으로 말미암아 추정 오차가 감소되었을 뿐만 아니라 체중 추정에 소요되는 노력이 크게 개선되었다. 한편, 체적 를 적용한 경우의 MAPE와 RMSE는 각각 12.6%, 35.7kg으로 나타났다. 한우의 체중 추정치는 실측치에 대해서 직선성을 유지하였으며, 결정계수는 0.952로 높게 나타났다(Fig. 7).
이제까지 가축의 체중 결정에 직접법 또는 간접법이 사용되었다. 직접법은 체중계를 이용하여 가축의 체중을 결정하는 것이다. 이 방법은 가축의 체중을 바로 확인할 수 있는 장점을 지니고 있다. 그렇지만 체중을 측정하려면 가축을 체중계 내로 유도해야 하고, 이 과정에 적지 않은 노동력이 요구된다. 더구나 가축의 움직임 또는 가축의 몸의 일부가 체중계의 프레임에 접촉하는 이유로 인해서 체중의 측정 오차가 생길 수 있다. 간접법은 체중계를 사용한 것 대신에 가축의 영상으로부터 체장 또는 체고 등의 체형 특성을 결정하거나, 영상의 단면적 또는 체적을 결정한 후 회귀 관계를 이용해서 체중을 추정하는 방법이다.
Brandl과 Jorgensen (1996)은 돼지의 비디오 영상으로부터 몸통 면적을 산출한 후 면적의 다항식 형태로 체중을 추정하였으며, Kashiha 등(2014)은 돼지의 몸통을 타원형으로 가정하여 면적을 구한 후 체중을 추정한 바 있다. 젖소에 대한 체중 추정은 획득된 영상으로부터 체형 정보를 결정하는 방식으로 이루어졌다. 이 가운데 Heinrichs 등(1992)은 홀스타인 계열의 송아지를 대상으로 흉위, 체장, 요각폭, 체고 등의 체형 특성을 측정한 후 체중과의 회귀관계로서 체중을 추정하였다. 여기에서 체중에 영향을 미치는 체형 특성은 흉위, 요각폭의 순서로 결정계수가 높게 나타났다. Haile-Mariam 등(2014)은 체장, 흉폭, 유방 깊이 등의 측정치로부터 홀스타인 젖소의 체중을 추정하였다. Tasdemir 등(2011)은 젖소의 영상으로부터 체장, 체고, 요각폭 등의 체형 특성을 결정한 후 이들의 회귀관계를 이용하여 체중을 추정하였다. 한편 Ozkaya와 Bozkurt (2008)은 비디오카메라를 이용하여 측정된 영상으로부터 도축우의 체장, 흉폭, 체고, 몸통 면적 등의 체형 특성을 측정한 후 이들의 회귀관계를 이용하여 체중을 추정하였다. 결과적으로 젖소의 체장, 흉폭, 체고 등과 같은 체형 특성이 체중 추정의 주요 변수로 사용되었다.
3-D 영상을 이용하여 가축의 체형 특성을 결정하거나, 체중을 추정하는 시도는 최근에 이루어지고 있다. Hansen 등(2018)은 키넥트 카메라를 이용하여 젖소의 3-D 영상을 획득하였으며, 획득된 영상으로부터 신체충실지수를 결정하고 체중을 추정하였다. Song 등(2018)은 키넥트 카메라를 이용하여 획득한 젖소의 3-D 영상으로부터 고장, 요각폭 등의 체형 특성을 결정한 후 월령 변수를 추가하여 체중을 추정하였다. Huang 등(2018)은 LiDAR 센서를 이용하여 Qinchuan 소의 3차원 영상을 획득한 후 전처리 과정을 거쳐 소의 3차원 형태를 재구성하였다. 다음으로 체고, 흉심, 체장 등의 체형 특성을 추정하면서 추정 오차를 2% 이내로 제시하였다.
한우에 대한 체중 측정은 사양 관리에 따른 증체량 또는 체형 특성의 변화를 분석하거나, 체형 정보의 상관관계를 구명하고자 시도되었다. Lee와 Ohh(1985)는 한우를 대상으로 체중, 체고, 체장, 흉심, 십자부고 등의 체형 특성을 측정하였다. 또한 체중에 영향을 미치는 체형 특성으로 흉위, 요각폭, 십자부고, 곤폭, 체고, 체장 등의 체형 특성을 제시하였다. 한우의 영상을 이용한 체중 추정은 Jang 등(2020)에 의해서 처음으로 시도되었다. 이들은 TOF 카메라를 이용한 한우의 3-D 영상으로부터 체장, 체고, 흉폭 등의 체형 정보를 결정하였으며, 이러한 체형 정보를 이용하여 체중을 추정하였다. 그런데, 측정된 3-D 영상에 체형 정보를 결정하기 위한 측정 기준의 적용이 애매할 뿐만 아니라 체형 정보의 결정에 많은 노력이 요구된다. 이러한 어려움을 극복하고자 본 연구에서는 획득된 한우의 3-D 영상으로부터 몸통 체적을 산출하였다. 또한 몸통 체적을 이용하여 한우의 체중을 추정하였다. 몸통 체적을 이용한 한우의 체중 추정은 획득된 영상에 대한 배경 분리, 이상치 제거 등의 전처리 작업 및 체적 산출의 자동화를 가능하게 하여 체중 추정에 소요되는 노력을 크게 줄일 수 있다.
본 연구에서 시도된 몸통 체적을 이용한 한우의 체중 추정에서 상대적으로 오차가 크게 나타난 데이터는 체중계의 프레임에 몸을 기대고 있는 샘플의 영상이었다. 체중계의 프레임에 복부가 닿을 경우 3-D 영상정보를 정확하게 추출하기가 어려웠다. 또한 체중계 내로 진입한 한우의 지속적인 움직임으로 인해서 신뢰할만한 영상을 확보하기 어려웠다. 때문에 본 연구에서는 체중이 400kg 미만인 한우를 대상으로 체중을 추정하였다. 그럼에도 불구하고 본 연구에서 시도된 3-D 영상의 체적과 체중 사이의 회귀 관계를 이용하여 한우의 체중 추정의 가능성을 확인하였다. 향후 3-D 영상으로부터 계산된 체적을 이용하여 체중을 정확하게 추정할 수 있는 모형을 개발하려면 이상치를 효과적으로 제거하는 전처리와 함께 더 많은 데이터의 획득이 필요하다. 또한, 체중 측정 및 3-D 영상을 획득하는 단계에서 한우의 몸통이 체중계의 프레임에 닿지 않도록 기존의 제원보다 더 큰 체중계의 제작이 요구된다.
