

서 론
과수생산의 경우, 대체적으로 재배면적이 작고 작목의 수가 다양하며, 재배방식 또한 작목에 따라 다르기 때문 에, 작업 기계화와 설비 자동화의 추진에 있어서 어려움 이 있다. 특히 국내외적으로 과수원예에 대한 수요가 급 증하고 있어 이들 과수생산 농가가 발전하기 위해 생력 기계화 설비의 개발이 절실히 필요하다.
과수와 관련하여 다양한 연구(Nam 등, 2013)가 진행 되고 있고 특히 농가의 과수 방제 작업 시 약제에 작업 자가 노출됨으로 인해 유해한 영항을 받기 때문에(Pyo, 2006) 작업자의 약제 노출을 최소화하고 적정 약액 살포 (Min 등, 2011)를 통해 이러한 위험을 줄일 필요가 있다 (Lee 등, 2012). 이러한 연구에는 위상-도플러 입자 분석 기를 이용하여 살포된 약액 입자를 분석하여 최적의 약액 살포 환경을 찾음으로써 적정량의 약액을 살포하는 방법 (Ebert 등, 2003), 오버헤드 가이던스 시스템(Park, 2007), 약액의 효율적인 살포량을 계산하는 살포기(Walklate 등, 2011), 배나무 재배지의 환경에 따라 약액을 균등하게 살포할 수 있는 약대의 설계(이 등, 2013) 등이 있다. 이러한 연구들을 바탕으로 하여 작업자의 약제 노출을 줄이기 위해 무인으로 작업하고 적정 살포 거리를 유지 하며 과수의 형태나 거리에 의한 변화에 대응할 수 있 는 시스템에 대한 연구가 필요하다.
본 연구에서는 과수 생산의 생력화와 작업자의 안전을 위하여 무인으로 과수의 형태, 거리에 따라 약대가 항상 기존의 실험(Lee 등, 2013)을 통해 결정된 적정 살포 거 리를 유지하며 작업을 진행하며 약대의 보호를 위하여 진행 방향에 장애물이 존재할 경우 회피 할 수 있는 형 태로 배나무 무인 방제를 위한 약대 자동 제어 시스템 을 개발 하고자 한다.
재료 및 방법
1. 자동제어 시스템 하드웨어 제작
본 연구에서는 기존에 개발한 약대(Hwa 등, 2013)를 이용하여 과수의 형태, 거리에 따라 약대가 항상 적정 살포 거리를 유지하며 방제 가능한 무인 살포기를 개발 하기 위하여 약대 자동 제어 시스템을 개발하고자 하였 다. Fig. 1은 설계된 약대의 모습이다. 그림에서 약대는 접힌 상태와 펼쳐진 상태를 나타내고 있다. 약대의 좌측 은 대차(Won 등, 2013)에 고정되어 300mm까지 상·하 로 움직이도록 설계 되었으며, 중앙 부위는 수평방향으 로 최대 2500mm까지 펼쳐지도록 하였다. 마지막으로 우측 약대는 60° 각도를 조절 할 수 있도록 하였다. 상 방향과 측 방향에는 분사 노즐을 설치하여 약대의 형태 에 따라 분사를 할 수 있도록 하였다. 약대는 대차에 좌·우 대칭되는 형태로 설치하였다.
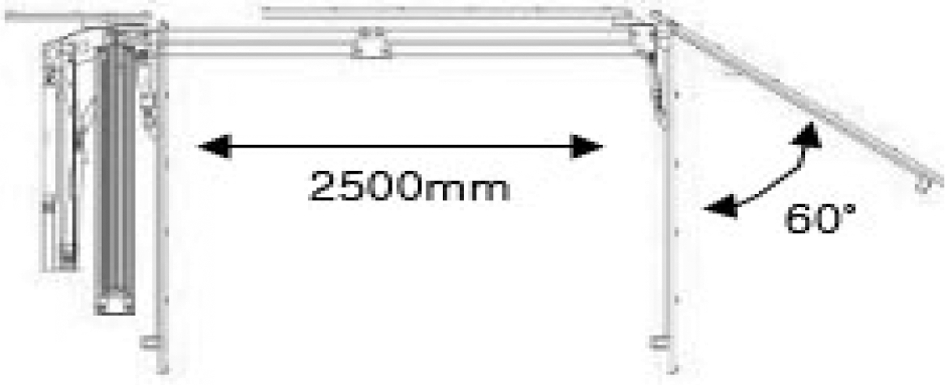
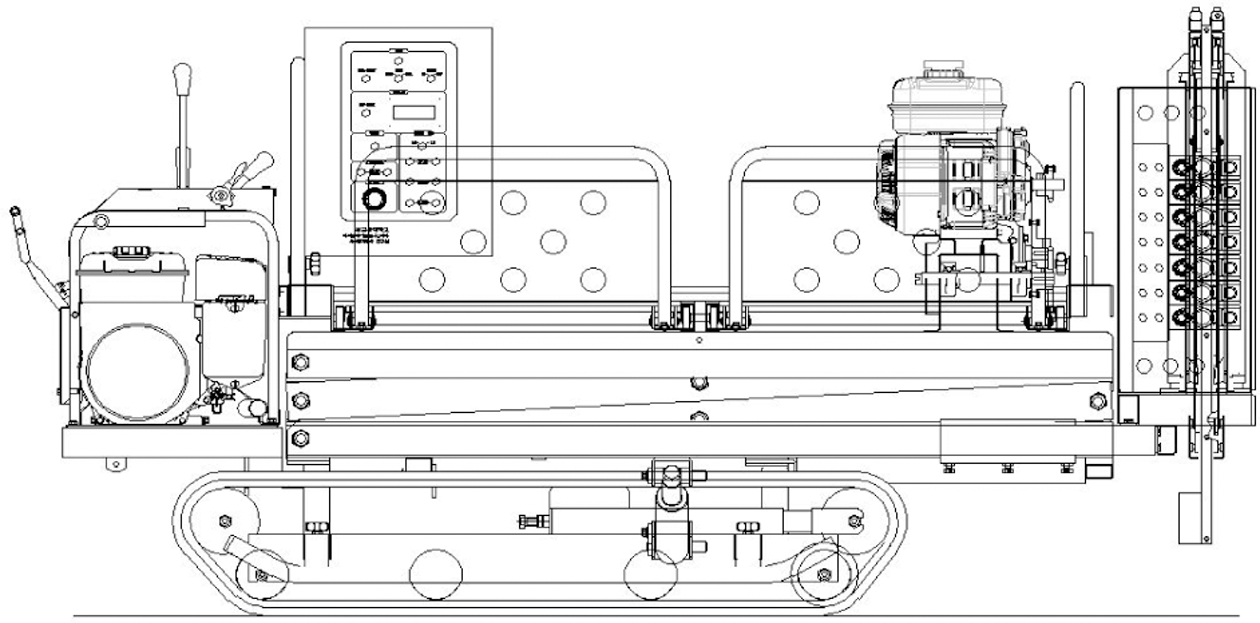
Fig. 2는 대차를 포함한 전체 시스템의 측면도를 나타 낸다. 그림에서 대차의 우측단부에 약대와 이를 제어하 기 위한 솔레노이드 밸브가 설치되고 그 옆에 분사를 위한 엔진을 위치시켰다. 대차의 조향 장치 옆에 컨트롤 패널을 설치토록 설계하였다. 약대가 설치된 대차는 총 길이 1960mm, 폭 1600mm(양측 약대를 최대한 펼쳤을 때 5750mm), 높이 1195mm(약대를 최대한 올렸을 때 1495mm)이다. 이는 기존의 연구(Lee 등, 2013)에서 측 정 된 배 농가의 환경에 맞춰 설계하였다.
먼저, 약대 시스템을 자동 제어하기 위한 MCU를 선 정하였다. MCU 선정 시 고려사항으로는 약대 실린더 동작을 위한 6개의 솔레노이드 밸브와 전체 솔레노이드 밸브의 릴리프 밸브 제어, 분사 압력 조절 모터 제어, 엔진 On/Off 제어, 분사 릴리프 밸브 제어, 전체 시스템 의 수동제어를 위한 출력 포트가 필요하였고, 입력으로 는 좌우 6개의 초음파 센서의 신호, 분사 릴리프 밸브의 Open/Close 한계 신호, 분사압력센서 신호를 수신하고 처리하였다. 총 입력 포트 34개, 출력 포트 16개, 블루 투스 통신을 위하여 RS232 포트가 필요하였으며, 초음 파 센서 중 디지털 타입의 신호를 받기위한 PWM 포트 3개, 아날로그 타입의 입력을 받기 위하여 A/D 컨버터 포트 3개가 필요하였다. 이러한 조건에 맞추기 위하여 Table 1과 같은 성능의 MCU 모듈을 선택하여 시스템을 제작하였다.
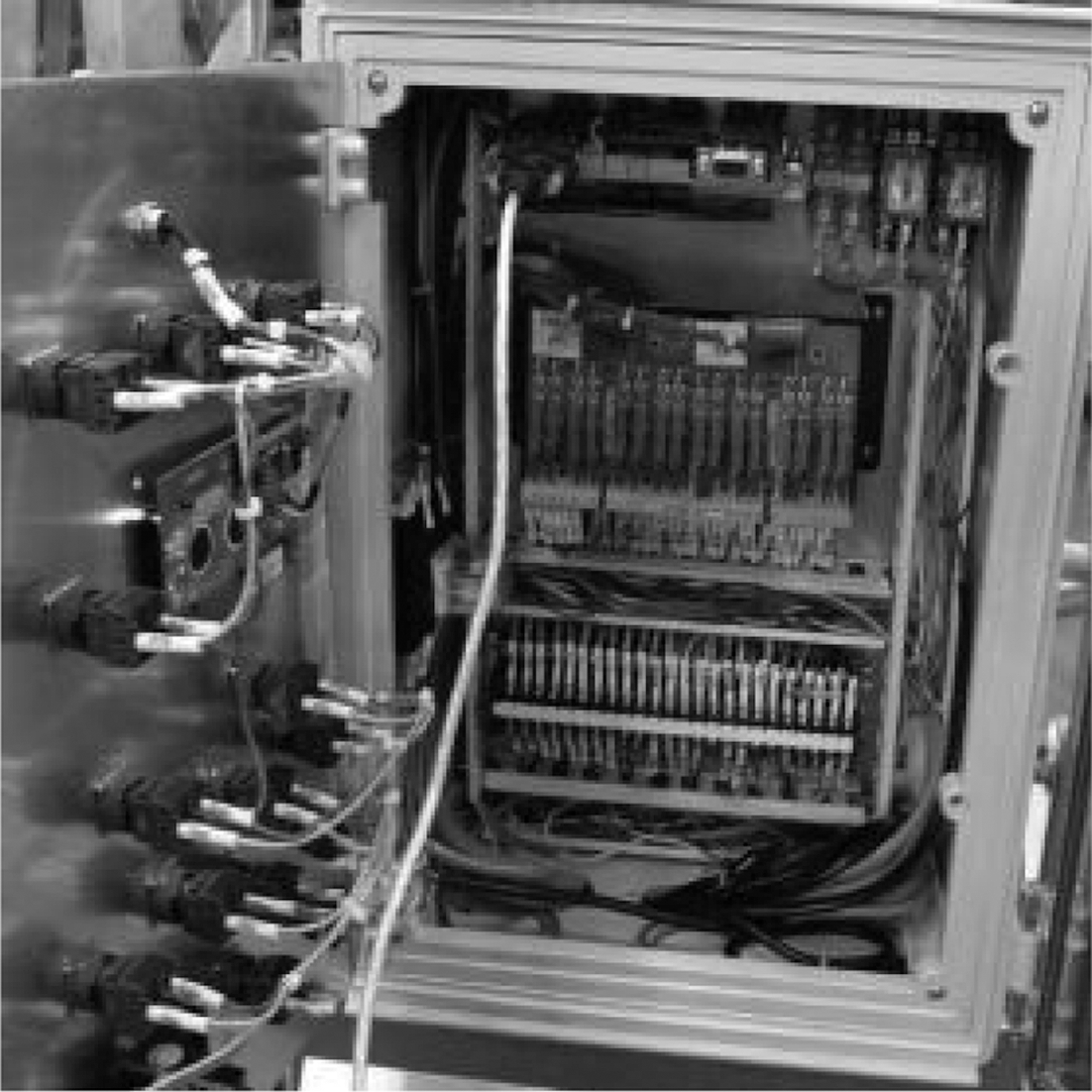
Fig. 3은 제작된 자동 제어부의 모습이다. MCU의 입 출력 신호는 24V인데 반하여 초음파 센서는 5V, 솔레노 이드 밸브와 압력 센서는 12V 등 입출력 신호의 크기가 상이하였고, 또한 안전을 고려하여 릴레이 스위치를 이 용하여 입출력을 연결하여 제어부를 제작하였다. 그림의 좌측은 제어 패널로 수동 제어를 위한 스위치와 상태를 확인하기 위한 LCD가 설치 되어있으며, 내부에는 MCU 와 릴레이, 배전반이 위치하고 있다.
초음파 센서는 약대에서 과수까지의 거리를 수직, 수 평 방향으로 측정하여 약대가 항상 적정 거리를 유지할 수 있도록 하고, 약대의 보호를 위해 전방에 존재하는 장애물까지의 거리를 측정하여 회피할 목적으로 Fig. 4 와 같은 형태로 좌우 3개씩 설치하였다.

설치한 초음파 센서는 수직, 수평 방향 거리 측정을 위 하여 0.1~3m까지 측정 가능하고, 0~5V의 아날로그 출력 을 갖는 초음파 센서(UDS10A)를 선정하였고, 전방의 장 애물 감시를 위해서는 3m 이내에 물체가 있을 경우 신호 를 출력하는 형태의 초음파 센서(UDS10B)를 사용하였다.
2 자동제어 시스템 알고리즘
기 수행된 실험을 통하여 선정된 본 시스템의 적정 살 포거리는 상 방향 0.9~1.1m, 측 방향 1.2~1.8m로 나타 났으며 본 연구에서 자동제어는 해당 거리를 적정거리로 하여 약대와 과수의 거리를 유지하고, 진행 방향에 장애 물이 존재한다면 회피 기동을 하는 것이 목적이다. 먼저 진행 방향의 초음파 센서는 3m 이내에 물체가 감지되면 5V의 신호를 출력하는 디지털 형태로 이 신호가 입력되 면 우선적으로 회피 기동을 하도록 하였다. 그 후, 측 방향과 상 방향의 초음파 센서의 신호에 따라 거리를 측정하고 해당 거리를 통해 약대의 움직임을 제어토록 하였다. Fig. 5는 약대 제어 알고리즘의 순서도이다.
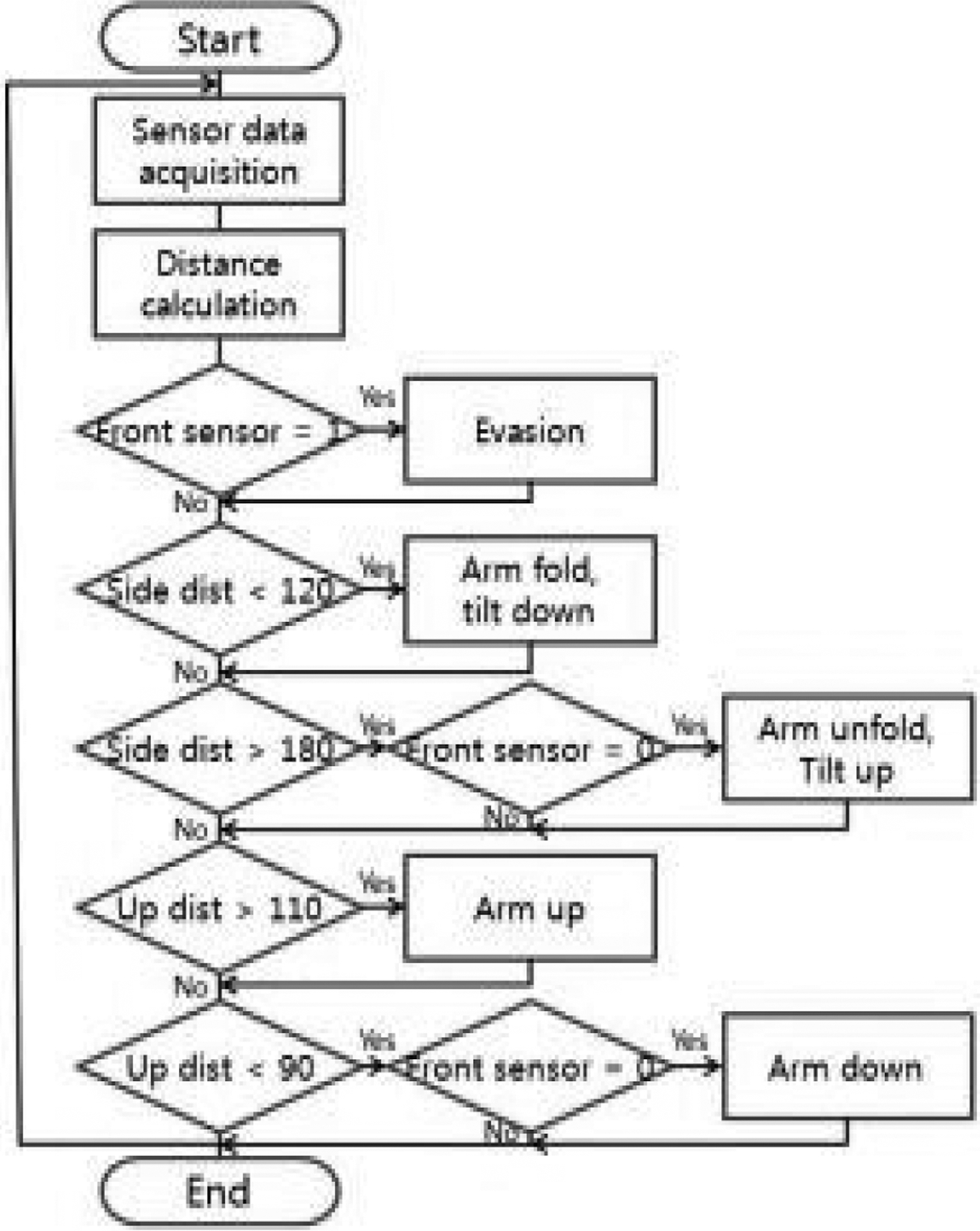
진행 방향 센서의 신호를 통해 장애물을 감지하면 약 대를 들면서 동시에 접는다. 이 때 다른 방향의 거리와 상관없이 장애물이 존재하는 경우 회피를 우선적으로 수 행하도록 하였다.
실험을 통해 초음파 센서의 신호를 받은 결과 잡음의 발생으로 시스템의 오작동이 관찰되었다. 따라서 최대한 오차를 줄이기 위하여 센서 당 5번의 연속 신호를 받은 후 최대치와 최소치를 뺀 3개의 신호의 평균을 이용하 여 거리를 측정하였다.
전체 알고리즘은 좌, 우측 신호를 순차적으로 받아서 계산하고 제어하였다.
MCU를 통하여 전체 시스템을 제어할 수 있도록 프로 그래밍 하였으며, 제어 신호는 릴레이 스위치를 통하여 각 시스템과 연결 하였다. 좌, 우측 각 3개씩의 초음파 센서를 통하여 거리 정보를 얻도록 하였으며 획득한 거 리 정보에 따라 약대를 제어하였다.
제작된 시스템으로 배 과수원에서 현장 실험을 수행하 였다. 시스템의 진행방향을 기준으로 좌, 우측 배나무에 감수지를 일정 거리마다 부착하고 비자동제어 상태와 자 동제어 상태에서 시스템을 운행하였다. 감수지의 원 색 상은 노란색이고 물이 닿으면 푸른색으로 변하는 성질을 갖고 있다. 각 실험 후 감수지를 수거하여 색상이 변한 영역의 비율을 분석하였다. Fig. 6은 현장 실험 수행 모 습이다. 현장 실험 시 풍속은 0.5m/s 이하였기 때문에 결과 분석에 있어 풍속 및 풍향에 의한 영향은 고려하 지 않았다.

Fig. 7은 실험 후 감수지의 모습으로 밝게 나타나는 영역은 물이 닿지 않아 색이 변하지 않은 노란색 영역 이며, 어두운 영역은 물이 묻어 파란색으로 바뀐 영역이 다. 이를 분석하기 위하여 각 감수지들을 스캔하여서 영 상 처리하였다. RGB 정보를 HSI 색상 모델로 변환한 후 Hue의 값을 이용하여 노란색과 파란색을 구분하고 파란색 영역의 픽셀을 전체 영역의 픽셀에 대한 비율로 나타냈다.

상·하 제어를 통한 분사 결과가 어떻게 나타나는지 분석하기 위하여 3그루의 배나무의 잎 영역을 15등분 하여 각 영역에 있는 잎에 감수지를 부착하고 비 자동 제어 상태와 자동제어 상태로 실험을 수행하였다.
결과 및 고찰
Table 2는 비 자동제어 상태에서 실험 후 각 영역의 감수지의 상태를 나타낸 것이고 Table 3은 자동제어 상 태에서 실험 한 결과를 나타낸 것이다.
Table 2.
Up/Down non auto control experiment results (%).
| Tree | Left | Mid | Right |
|---|---|---|---|
| #3 | 68.31 | 87.1 | 99.88 |
| #2-#3 | 99.62 | 98.61 | 89.14 |
| #2 | 91.35 | 91.4 | 68.8 |
| #1-#2 | 77.29 | 84.78 | 66.79 |
| #1 | 95.84 | 99.8 | 96.18 |
| STD | 11.82 | Mean | 87.06 |
Table 3.
Up/Down auto control experiment results (%).
| Tree | Left | Mid | Right |
|---|---|---|---|
| #3 | 88.1 | 90.34 | 97.62 |
| #2-#3 | 92.53 | 95.27 | 90.01 |
| #2 | 89.95 | 45.4 | 97.51 |
| #1-#2 | 61.38 | 89.34 | 96.53 |
| #1 | 91.58 | 97.3 | 95.43 |
| STD | 14.22 | Mean | 87.89 |
현장 실험 결과 약대의 상하 방향 제어는 비자동제어 와 자동제어에서 큰 차이가 나타나지 않았다. 이는 자동 제어 시 상방향 거리를 0.9~1.1m를 유지하도록 하였으 나 비 자동제어 시에도 약대와 배나무와의 거리가 0.9~ 1.1m 내에서 크게 벗어나지 않았기 때문에 제어 상태에 큰 영향을 받지 않았다.
하지만 측 방향 분사 실험에서는 실제 과수원의 배나 무가 수평하게 식재되어 있지 않았기 때문에 두 가지 상태에서 서로 다른 결과를 얻었다.
Table 4에 따르면 비 자동제어 상태에서 좌측 열의 나 무에 분사된 양이 적은 것을 확인할 수 있다. 이는 시스 템의 진행방향을 기준으로 좌측 배나무 열이 점차 멀어 지는 경향을 보였기 때문에 비 자동제어 시에는 좌측열 에 분사되는 양이 줄어들었고, 자동제어 시에는 약대를 제어하여 거리를 유지할 수 있었기 때문에 더 나은 결 과를 얻을 수 있었다. 또한 우측 열에 장애물이 존재하 였으나 이를 회피할 수 있음을 확인하였다. 하지만 회피 시에는 약대가 적정 살포 거리를 유지하지 못하기 때문 에 상대적으로 분사율이 떨어짐을 확인하였다.
Table 4.
Auto control experiment results (%).
| Non auto control | Auto control | |||
|---|---|---|---|---|
| Tree | L | R | L | R |
| Mean | 69.25 | 98.09 | 92.66 | 94.64 |
| STD | 30.84 | 2.77 | 3.18 | 3.55 |
시스템의 제어 속도를 측정하기 위하여 약대의 속도를 측정하였다. 각 방향 별 약대의 평균 속도는 Table 5와 같다.
