

서 론
1990년대 이후 고품질 모종을 생산하기 위하여 증가하 고 있는 접목작업은 수확량 증가, 연작장애 방지, 효율 적 생산, 내병성 증진 등 다양한 이유로 꾸준히 증가하 고 있는 추세이다(Kim과 Hwang, 2015;Nishiura, 2011). 접목작업을 통해 생산되는 모종은 수박 99%, 참 외 98%, 토마토 69%, 가지 41% 등으로 높은 비중을 차지하고 있고(NIHHS, 2013), 접목묘의 양은 연간 한국 약 4억본, 일본 약 5억본 등 전 세계적으로는 약 1,000 억본 이상의 모종이 필요한 것으로 추산된다(Nishiura, 2011). 이러한 접목작업은 육묘장 전체 노동의 70~80% 를 차지할 정도로 많은 인력을 필요로 하지만(Kang 등, 2005), 작업 체계 및 작업자의 고령화, 단순반복작업 등 으로 인하여 생산량 증대에 어려움을 겪고 있다. 이러한 노동력 부족을 해결하기 위하여 최근에는 접목작업의 로 봇화에 대한 요구가 더욱 증가하고 있다. 2000년대 초반 에 과채류의 접목작업에 대한 자동화 연구는 한국과 일 본을 중심으로 박과작물을 대상으로 집게 이용 합접방식 (Suzuki 등, 1995a, 1995b;Kobayashi와 Suzuki, 1996), 삽접방식(Park 등, 1997)등의 접목시스템이 개발된 바 있고, 농촌진흥청을 중심으로 합접방식을 채용하여 박과 및 가지과에 대한 자동 접목로봇에 관련된 연구개발을 수 행한 바 있다(Kang 등, 2008). Kim과 Hwang(2015)은 농 촌진흥청에서 개발된 접목로봇은 농업현장에 적용 가치가 있으나, 절단 잔유물이 제거되지 않거나, 접수와 대목의 줄기가 완전하게 절단되지 않는 등의 이유로 접목불량률 이 21.7%로서 개선이 필요한 것으로 보고하였다. 따라서 본 연구의 목적은 작업자 미숙, 모종의 줄기의 형태에 따 른 모종 줄기 절단면 접합 불량 등의 원인으로 발생하는 접목로봇의 불량을 개선하고자 영상인식 기술을 채용한 접목로봇을 개발하고 그 성능을 분석하는데 있다.
재료 및 방법
1. 자동 접목로봇의 구성
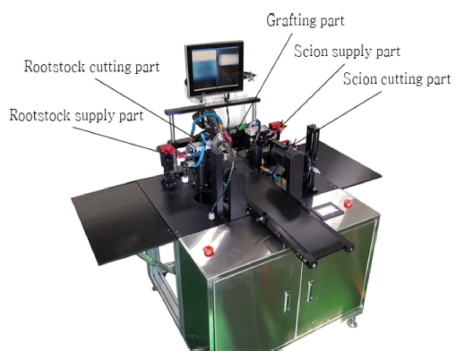
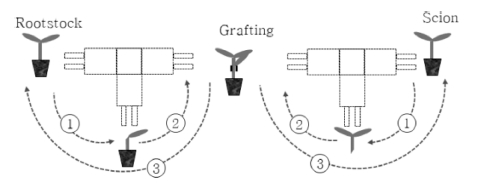
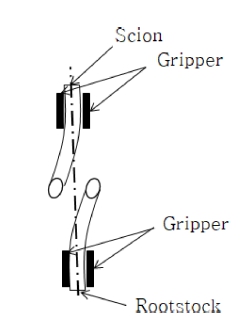
본 연구에서 개발된 자동 접목로봇은 Fig. 1과 같이 접수 및 대목 공급부, 접수 및 대목줄기 절단부, 접목부, 제어부로 구성된다. 접목로봇의 작동방법은 Fig. 2와 같 이 접목로봇의 접수 및 대목 공급부에 작업자가 모종을 공급하면, 그립퍼는 90° (Fig. 2의 ①) 회전된다. 회전된 그립퍼에 의해 회전된 모종은 줄기 절단용 칼날에 의해 대목은 상방향으로, 접수는 하방향으로 각각 50° 각도로 절단된다. 절단 각도는 칼날의 각도 조정에 의해 조절이 가능하다. 줄기가 절단된 접수와 대목은 다시 90° 회전 (Fig. 2의 ②)한 후 양쪽 그립퍼가 전진하여 절단면을 접 합시킨다. 이후 집게 공급부에서 집게가 공급되어 접목 묘를 완성시킨 후 접목묘를 하단부의 컨베이어로 떨어뜨 리고, 그립퍼는 모종 공급부로 복귀(Fig. 2의 ③)하도록 구성하였다. 접목이 완료된 묘는 접목부 하단의 이동하 는 컨베이어에 의해 이식 작업자까지 이동되어 플러그 트레이에 이식된다. 본 연구에서 개발된 접목로봇은 편 엽을 남기는 박과 모종에 대해 줄기 절단 시 한쪽 잎이 절단 되지 않도록 떡잎 고정용 바를 설치하여 박과 모 종과 가지과 모종 모두에 적용이 가능하도록 구성되었다. 또한 생육환경 등으로 인하여 발생하는 접수와 대목의 절단면의 부정확한 접합을 방지하기 위하여 접목로봇은 줄기 절단 후 영상을 인식하고, 서보모터(APMCFCL08AMK, LS Mecapion Co. LTD, Korea)를 이용하 여 모종이 회전하는 회전각을 조절하여 절단면이 정확한 접합이 가능하도록 하였다. 단 휨각으로 인한 회전각이 180±5° 이상 일 경우 집게 공급부 등과 충돌로 인한 그 립퍼 파손을 방지하기 위하여 회전각은 계산된 각이 아 닌 180° 회전하도록 설정하였다.
2. 접목묘 접목 특성 조사
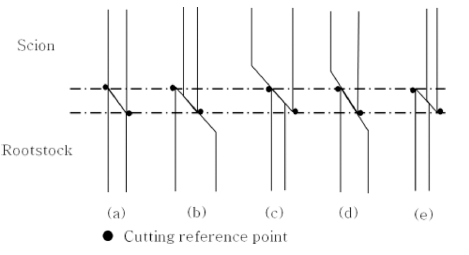
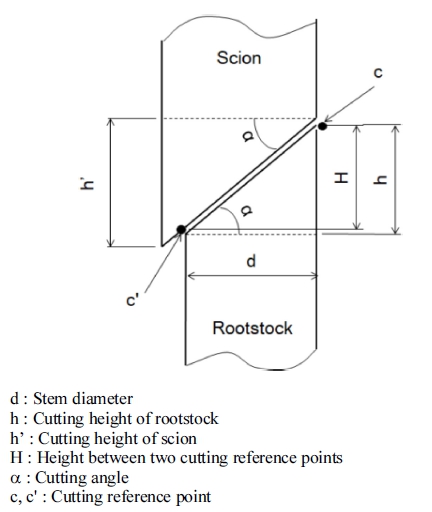
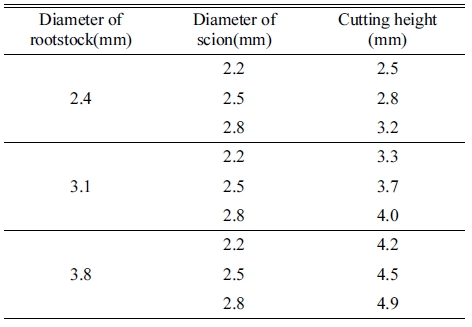
접목로봇의 불량률을 증가시키는 원인 중 하나는 Fig. 3과 같이 접목 시 줄기직경 차로 인한 절단면의 부정합 으로 인한 발생이다. 줄기직경의 차이로 인해 발생하는 접목불량은 절단 기준면이 일정한 접목로봇의 특성상 접 수와 대목의 줄기직경 차로 인해 Fig. 3 (d), (e)와 같이 절단면이 정확히 접합되지 못하여 발생한다. 이러한 불 량을 해결하기 위해서는 Fig. 3의 (a), (b), (c) 와 같이 절단면이 결합될 수 있도록 분류 기준을 설정해야하며, 이를 위하여 접목시기인 접수와 대목의 줄기직경 및 줄 기 절단각도를 조사 분석하였다. 줄기직경은 버니어캘리 퍼스(CD67-S20PS, Mitutoyo Corp, Japan)를 이용하였 고, 절단 각도는 줄기직경과 절단면의 길이를 조사하여 계산하였다. 조사대상은 4개 육묘장에서 접목이 완료된 모종을 해체하여 절단 부위로부터 2mm 위치에서 줄기 직경을 측정하였으며, 육묘장 당 30개씩 토마토 및 오이 접목묘에 대하여 조사하였다. 또한 Fig. 4와 같이 접수 와 대목의 줄기직경 차에 의해 발생되는 접목 불량은 절단 기준면에서의 절단높이 계산을 통해 최소화 할 수 있는 방법에 대하여 분석하였다. 이때 줄기 절단 각도는 50° 로 고정하였고, 접수와 대목의 절단기준면 높이는 토마토 대목의 평균 줄기직경을 기준으로 설정하여 분석 하였다.
3. 기계시각 이용 줄기 휨 분석 접목
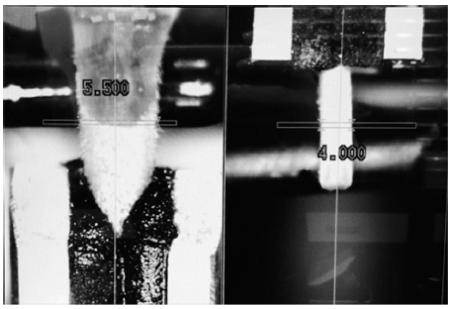
접목은 생육 초기의 모종을 이용하므로 육묘온실의 광 환경 및 발아 환경 등에 의해 발생하는 줄기의 휨이 발 생하므로 자동화가 어려운 작업이다. 이러한 줄기의 휨 은 Fig. 5와 같이 줄기 절단면이 정확히 접촉하지 못하 여 절단면의 접촉 불량 혹은 집게가 공급될 때 접수 및 대목의 줄기에 닿아 불량을 발생시켜 모종공급, 절단, 접목 등 일련의 작업을 수행하는 접목로봇의 접목성공률 저하의 원인이 된다.
Kang 등(2017)은 접목시기인 토마토 줄기의 휨은 평 균 10° 내외로 그립퍼로부터 5mm 돌출되었을 때 약 0.9mm 가 중심에서 이격될 수 있다고 보고하였다. 이러 한 불량을 해결하기 위하여 접목로봇은 접수와 대목 모 종 줄기의 휨을 인식하고 휨에 따라 그립퍼의 회전각 을 조절하도록 구성하였다. 줄기의 휨을 인식하기 위하 여 2대의 카메라(ANPVC1040, Panasonic Corp, Japan)를 설치하고, 카메라를 통해 입력된 영상은 이치 화 영상처리를 통하여 절단면의 휨을 계산하도록 구성 하였다. 줄기의 휨을 이용한 그립퍼의 회전각은 식(1) 과 같이 절단면의 양끝단 X축 좌표의 중심 값과 그립 퍼 중심의 X좌표와의 거리를 계산하고, 그 차를 이용 하여 계산된다.
| $$\mathrm D=180+\tan^{-1}\frac{{\mathrm P}_{\mathrm i}\left(\mathrm C-{\displaystyle\frac{{\mathrm E}_1-{\mathrm E}_2}2}\right)}{\mathrm L}$$ | (1) |
여기서, D: 회전각(°), Pi: 1픽셀 길이(mm), C: 그립퍼 중심의 X축 좌표, E1, E2 : 절단면 양끝 에지의 X축 좌 표, L : 그립퍼 회전중심에서 모종까지 거리(mm)이다.
4. 접목 성공률
접목 불량을 최소화하기 위하여 접수 및 대목 절단면의 휨을 영상인식하고, 이를 이용하여 접목을 위해 회전하는 접수 및 대목의 회전각 조절을 통해 접목률이 향상되도록 제작한 접목로봇의 접목 성공률을 조사하였다. 접목시험 은 박과의 대표 품종인 오이의 접수는 ‘장록흑진주’ (Cucumis sativus L. cv., Nongwoobio. Co. Suwon, Korea), ‘흑종호박’(Cucurbita moschata Duchesne, Nongwoobio. Co. Suwon, Korea)과 가지과의 대표 품종인 토마토의 접 수는 ‘티티찰’(Lycopersicon esculentum Mill., Nongwoobio. Co. Suwon, Korea), 대목은 ‘버팀목’(Lycopersicon esculentum Mill., Nongwoobio. Co. Suwon, Korea)를 대상으로 실시 하였다. 시험은 1회 20개의 접수 및 대목을 이용하여 시 험을 실시하여, 접목 시간과 접목 성공률을 조사하였다. 접목 성공은 접목이 완료된 모종의 집게를 제거 후 접 수와 대목 절단부위 미접합 부분이 1mm 이하일 경우로 하였다. 시험은 5반복으로 실시하였다.
결과 및 고찰
1. 접목묘 접목 특성 조사
접목시기 및 접목 부위는 지역별, 공정 육묘장 별로 차이는 있으나 접목시기는 2일 정도의 차이가 있었다. 박과의 접목위치는 큰 차이가 없었으나, 가지과 줄기의 절단부위는 대목 떡잎을 기준으로 윗부분과 아랫부분을 절단해야한다는 이견이 있었으나 대상농가마다 절단위 치에 따른 생육문제는 발생하지 않는 것으로 조사되었 다. 접목시기의 줄기직경은 가지과의 경우 접수모종은 약 2.5±0.3mm, 대목은 약 3.1±0.7mm인 것으로 조사 되었고, 박과의 경우 접수모종은 약 2.2±0.2mm, 대목 은 약 3.6±0.3mm인 것으로 조사되었다. 접수와 대목의 줄기직경 차에 따른 접목 불량률을 분석하기 위하여 접수와 대목 절단기준점 간의 높이를 3mm로 고정하고 , 줄기직경에 따른 절단 높이(Fig. 4의 h)를 계산한 결 과는 Table 1과 같다. 절단기준점의 높이 차가 4mm 이상에서는 대부분의 모종에 대해 접촉면이 작아 접목 불량이 발생하는 것으로 조사되었고, 절단 기준점의 높 이차가 2mm 이하에서는 접수와 대목의 절단면 겹침으 로 인하여 접촉부가 작아 불량이 발생하는 것으로 분 석되었다. 따라서 접수와 대목의 절단 기준점의 높이차 는 3mm 가 적당하며, 접수와 대목의 절단기준점 간의 줄기방향 거리는 평균 직경인 약 3mm 전후가 적당 할 것으로 사료된다. 또한 접목로봇을 이용한 접목 효율성 및 접목성공률 향상시키기 위한 방법은 대목과 접수의 경경을 균일하게 재배하거나(Kim과 Hwang, 2015), 접 수 및 대목 줄기직경이 모두 얇을 경우 Fig. 3의 (e)와 같은 불량의 최소화를 위해서는 접수 및 대목 중 하나 의 줄기직경이 평균값 이상인 것을 사용하기 위한 모 종 분류 작업 후 접목작업을 수행해야 할 것으로 사료 된다.
또한 줄기의 절단 각도는 인력으로 작업하기 때문에 접수는 13~55°, 대목은 15~67°의 범위로 다양한 것으로 조사되었다. 접수와 대목의 큰 절단각도 차는 접목 불량 의 원인이 될 수 있으므로 기계 절단을 통하여 접수와 대목의 절단각도를 일치 시킬 필요가 있을 것으로 사료 된다.
2. 기계시각 이용 줄기 휨 분석 접목
개발된 접목로봇은 Fig. 2와 같이 접목로봇에서 모종 이 공급되어 90° 회전한 후 절단 칼날을 이용하여 모종 줄기를 절단한다. 모종의 줄기가 절단 된 접수와 대목은 두 대의 카메라에 의해 각각 촬영된다. Fig. 6은 기계시 각을 이용한 접목로봇을 이용하여 접목작업을 수행한 결 과를 나타낸 것이다. Fig. 6과 같이 줄기 양 끝단 X좌표 의 중심좌표와 그립퍼 중심의 X좌표와의 거리는 계산된 다. 계산된 두 중심 간 거리를 이용하여 그립퍼의 회전 각을 계산하고 이에 따라 그립퍼는 회전하여 접목위치로 이동한다. 접목위치로 이동하였을 때 계산된 회전각과 실제 회전각은 정확히 일치되었고, 정확한 접목이 이루 어지는 것으로 조사되었다. 기계시각 적용으로 휨을 인 식하고 서보모터를 이용한 정밀 제어함으로써 Kim과 Hwang(2015)이 접목로봇의 불량 원인으로 제시한 연속 적인 동작의 불안전성과 기계적 오류는 해결 될 것으로 사료된다.
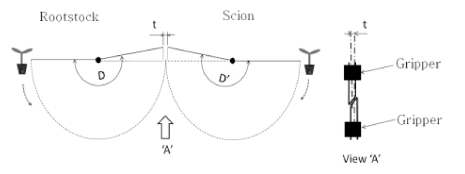
접수와 대목의 절단면의 정밀접합을 위한 그립퍼의 추 가 회전으로 인하여 발생할 수 있는 접수와 대목 절단 면 간의 이격(Fig. 7의 t)은 집게 공급 시 줄기와 집게의 부딪힘으로 인하여 불량이 발생 할 수 있다. Kang 등 (2017)이 보고한 토마토 줄기의 최대 휨각인 28°이고 그 립퍼로부터 5mm 돌출된 모종의 경우 절단면의 중심은 그립퍼의 중심으로부터 2.3mm 이다. 이를 이용하여 계 산된 그립퍼의 회전각(Fig. 7의 D 및 D')은 181.4°이고, 이로 인해 발생하는 두 절단면간의 이격거리(Fig. 7의 t) 는 0.1mm이하이므로 그립퍼의 회전각 조절로 인하여 발생하는 접목 불량은 없을 것으로 사료된다.
3. 접목 성공률
접목로봇에 영상인식 기술을 적용하여 오이와 토마토 에 대한 접목시험을 실시한 결과는 그림 Fig. 8과 같다. 접목 시험에서 20개의 모종에 대해 5회 반복시험을 실 시한 결과 오이는 96±3.2%, 토마토는 95±4%의 접목 성 공률이 조사되었다. 접목 불량의 원인으로 오이는 작업 자의 부주위로 대목 절단 시 떡잎 모두를 자르는 경우, 집게 공급 혹은 집게의 불량으로 발생하였고, 토마토는 집게공급 시 떡잎과 부딪혀 발생하는 불량, 집게 공급 또 는 집게 불량으로 인하여 발생하는 것으로 조사되었다. 가장 많은 불량을 발생시키는 집목집게는 집게의 용수철 을 파지하여 공급할 때 용수철의 편심으로 인한 것으로 조사되었다. 따라서 작업자의 숙련도 향상 및 집게 형상 의 개선은 불량률을 최소화기 위해 필요할 것으로 사료 된다.

